VC R-CNN [将常识引入特征]
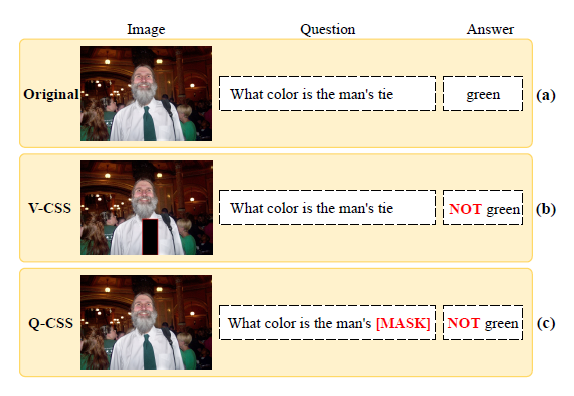
现今的计算机视觉系统擅于告诉我们”什么”,”哪里”,但并不擅长告诉我们”为什么”,这个”为什么”指的就是视觉原因,缺乏常识很容易导致机器学习中的认知误差,比如和leg区域相比,有更多的person区域和ski单词一同出现,那么视觉注意力会更多地放在人身上,但如果我们拥有”常识性”的特征,看到ski的时候我们就会把注意力集中到脚上

常识并不总是包含在语言中的(因为有reporting bias),比如我们会看到”人在路上走”,但应该很少见到”人用脚走路”。NLP中词X可以通过预测上下文中的Y来学习,但是这种做法很难迁移到图像中,因为图像中对象同现的显式原因无法被观察到,那么导致X和Y同现的真正常识会被observational bias混淆,比如如果键盘和鼠标总是被观察到在桌子上,那么得到的常识可能是键盘和鼠标是桌子的一部分而非电脑
文章利用MS-COCO数据集中的标注信息,计算Association P(Y|X)和Intervention P(Y|do(X))之间的区别,这里可以简单地理解为1.从别的图片”bollow”一个对象Z;2.将这个Z”put”在X和Y的周围;3.看看在Z的影响下X是否还会导致Y的出现,这里”bollow”和”put”就是干预的核心,这里的Z是干预的结果,不依赖于X和Y,通过这种方法,来自背景的bias会减轻
文章在R-CNN的基础上提出了VC R-CNN框架,对do-operation提出了一种新算法,VC R-CNN框架如图所示
而学习到的VC Feature就作为了干预武器的化身
相关工作
Multimodal Feature Learning
随着最近NLP中预训练语言模型(pre-training language models, LM)的成功,研究者开始寻求从大的、未标记的多模态数据中进行弱监督学习来编码视觉-语义知识。然而,所有这些方法都存在语言的报告偏差(reporting bias),以及下游微调的巨大记忆成本,而VC R-CNN是只基于图片的无监督学习,且能和原先的表征串联
Un-/Self-supervised Visual Feature Learning
这类研究通过一个精心设计的代理任务(proxy task)来学习视觉特征,比如去噪自动编码器,上下文和旋转预测和数据扩充,上下文预测是通过相关性来学习的,而图像的旋转和增强可以看作是采用随机对照试验,这些都是主动的和非观察的(non-observational),而VC R-CNN是通过因果推论,是被动和非观察的
Visual Common Sense
之前的研究分为两类:1.使用常识知识从图像中学习;2.从视频中学习行为。然而,前者将常识局限于人类注释的知识,而后者本质上又是从相关性中学习
Causality in Vision
和其它工作不同的是,VC R-CNN提供了一个通用的特征提取器
Sense-making by Intervention
Causal Intervention
如上左图所示,在现实世界中,很多情况下X和Y的发生是存在混杂因子(confounders)Z的,如果只从P(Y|X)中学习会导致虚假的相关性,也可以从贝叶斯公式来说明这一点
$P(Y|X)=\sum_zP(Y|X,z)P(z|X)$
confounder Z通过$P(z|X)$造成observational bias
do操作的本质就是去切断Z和X之间的联系
$P(Y|(do(X))=\sum_zP(Y|X,z)P(z)$
通过干预$P(Y|do(X))$作为特征学习目标,可以在”common”和”sense-making”之间进行调整,从而缓解observational bias
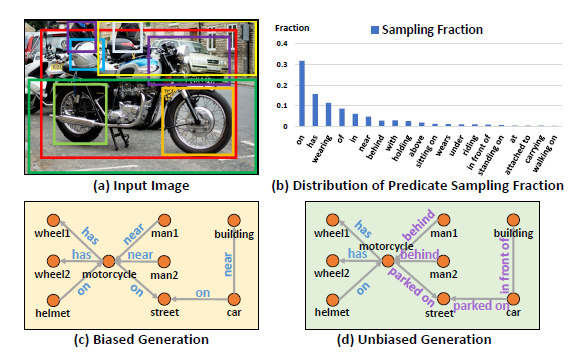
图a中是分别用$P(Y|X)$和$P(Y|do(x))$统计的特征,可以发现相比于$P(Y|X)$中,window和leg被放在一起的情况(因为人在街道上走的图片中通常有带窗的建筑),$P(Y|do(x))$中两者显然被分开了,而图b中可以看到在VC R-CNN特征图中,ski明显离leg和snow更近
The Proposed Implementation
因为现实中的confounder是很难被收集全的,文章建立了一个confounder词典,将RoI特征在每个类别上取平均,特征是通过Faster R-CNN得到的
干预实现如下:
$P(Y|do(X))=E_z[Softmax(f_y(x,z))]$
考虑到$E_z$成本高昂,用Normalized Weighted Geometric Mean (NWGM)来近似
由于混淆因子作为类别平均特征的因果关系尚未验证,即Z可能包含碰撞器(或v型结构)干预时,会导致虚假的相关性。为此,文章应用NCC从z移除可能的碰撞器。给定x和z, NCC(x to z)输出从x到z的相对因果强度,然后丢弃碰撞器因果强度大于阈值的训练样本
VC R-CNN
VC R-CNN以图像为输入,从CNN主干(如ResNet101)中生成feature map。与faster R-CNN不同,VC R-CNN丢弃了Region Proposal Network(RPN),直接利用ground-truth bounding boxes提取RoIAlign层的目标层表示。最后每两个RoI特征x,y最终成为两个预测因子分支:使用全连接层来估计每个对象类的Self Predictor,以及利用do-calculus来预测context label的Context Predictor
对于RoI X来说,损失函数为
p是Self Predictor输出的N个类别的离散概率分布,$x^c$是RoI X的ground-truth class,$y_i^c$是ground-truth label
$L_{self}(p,x^c)=-log(p[x^c])$
$L_{cxt}(p_i,y_i^c)=-log(p_i[y_i^c])$
实验
消融实验
Only VC是单纯的VC feature,+Det是只有Self Detection,+Cor是只有context labels,无干预,+VC是文章中的完整的干预过程得到的特征连接上原始特征
对SOTA model的影响
效果展示(右侧是VC feature)
![支付宝]() 支付宝
支付宝